
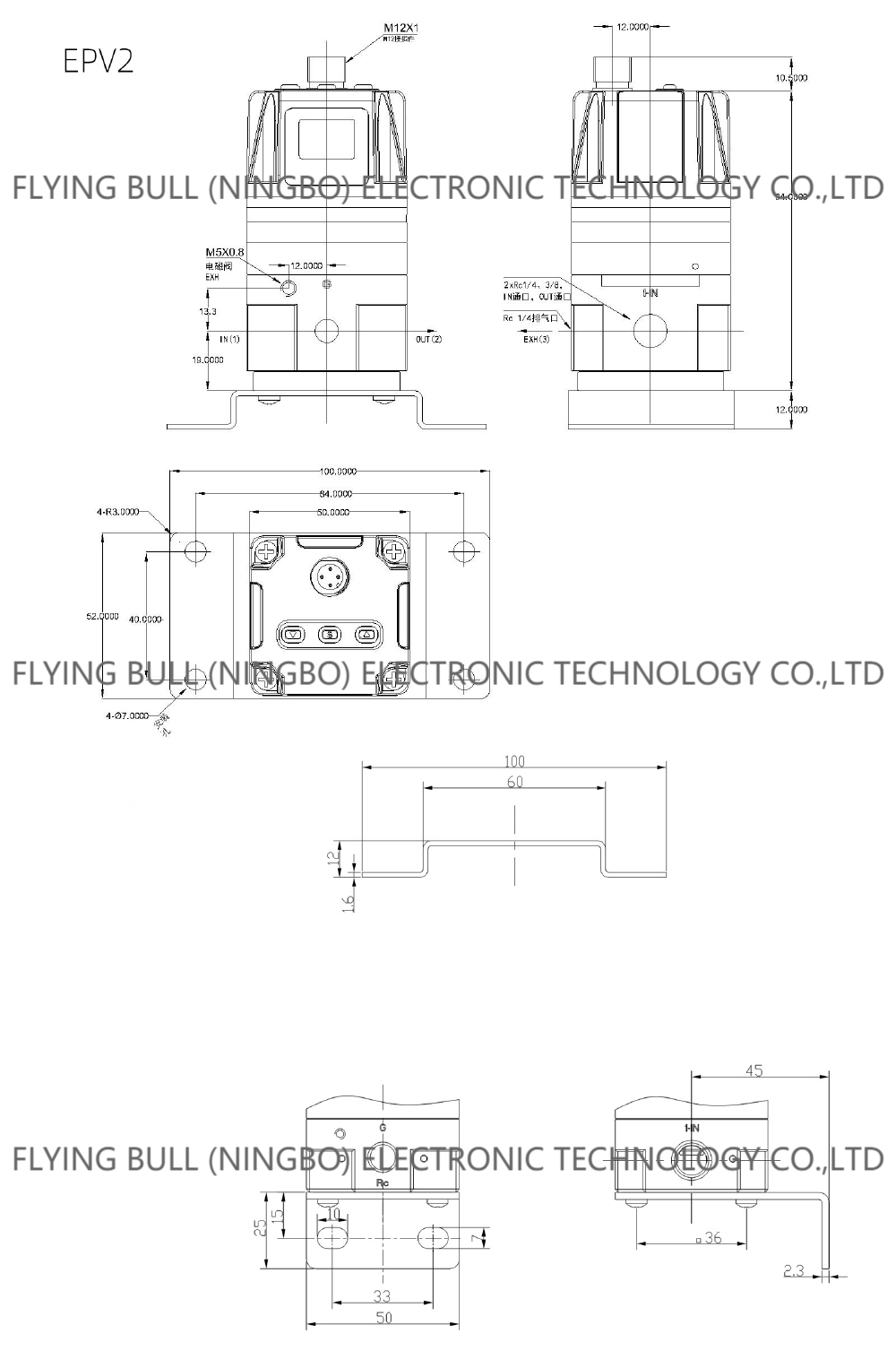
Regulator filtra powietrza Seria EPV2 Elektroniczna proporcja pneumatyczna

Bliższe dane
Ciśnienie zasilania min: Ustaw ciśnienie +0,1 MPa
Numer modelu: EPV2-1 EPV2-3 EPV2-5
Zakres ciśnienia: 0,005 ~ 0,5 MPa
Wejście Rodzaj prądu: DC4 ~ 20MA, DC0 ~ 20mA
Typ napięcia sygnału wejściowego: DC0-5V, DC0-10V
Wyjście wyjściowe Wyjście: NPN, PNP
DC: 24 V 10%
DC: 24 V mniej niż 1,2a
Impedancja wejściowa Typ prądu: 250 Ω mniej niż
Napięcie rezystancji wejściowej Rodzaj: około 6,5 kΩ
Wejście wstępne: DC24VTYPE: około 4,7k
Wyjście analogowe: „DC1-5V (impedancja obciążenia: 1KΩDED niż)
DC4-20MA (Impedancja obciążenia: 250kΩless niż
Dokładność wyjścia w granicach 6%(FS) ”
Linia: 1%FS
Powolny: 0,5%FS
Powtarzalność: 0,5%FS
Charakterystyka temperatury: 2%FS
Dokładność wyświetlania ciśnienia: 2%FS
Wyświetlanie ciśnienia Ukończenie: 1000 -ukończenia
Temperatura otoczenia: 0-50 ℃
Klasy ochrony: IP65
Umiejętność dostaw
Sprzedające jednostki: pojedynczy przedmiot
Rozmiar pojedynczego pakietu: 7x4x5 cm
Pojedyncza masa brutto: 0,300 kg
Wprowadzenie produktu
Elektryczny zawór proporcjonalny ma uświadomić sobie kontrolę przepływu przepływu przez kontrolę elektroniczną. Urządzenie regulacyjne ciśnienia elektrycznego składa się z zaworu elektromagnesu wlotu powietrza i wydechu, czujnik wykrywania ciśnienia i obwodu sterowania. Gdy istnieje sygnał wejściowy, otwierany jest zawór elektromagnesu wlotu, zawór elektromagnesu spalin jest zamknięty, zawór główny dostarcza powietrze do komory pilotowej, a główny rdzeń zaworu przesuwa się w dół do wyjściowego ciśnienia wtórnego.
Edycja zasad strukturalnych
Gdy sygnał wejściowy jest zwiększony, zawór pilotażowy 1 zaworu elektromagnesu dla zasilania powietrza jest odwrócona, a elektromagneski zawór pilotowy dla wydechu powietrza znajduje się w stanie resetowania, a następnie ciśnienie powietrza wchodzi do komory pilotowej 5 z portu SUP przez zawór 1, a ciśnienie w Pilot Or komorę wzrasta, a ciśnienie powietrza działa Membrga 2 jest otwarta, a rdzeń 3 zaworu wydechowego jest zamknięty, co powoduje ciśnienie wyjściowe. To ciśnienie wyjściowe jest podawane z powrotem do obwodu kontrolnego 8 przez czujnik ciśnienia 6. Tutaj ciśnienie wyjściowe jest szybko porównywane z wartością docelową, aż będzie proporcjonalna do sygnału wejściowego, tak że ciśnienie wyjściowe zmieniło się proporcjonalnie do sygnału wejściowego. Ponieważ nie ma mechanizmu przegrody dyszy, zawór jest niewrażliwy na zanieczyszczenia i ma wysoką niezawodność. Edycja zasad strukturalnych
Gdy sygnał wejściowy jest zwiększony, zawór pilotażowy 1 zaworu elektromagnesu dla zasilania powietrza jest odwrócona, a elektromagneski zawór pilotowy dla wydechu powietrza znajduje się w stanie resetowania, a następnie ciśnienie powietrza wchodzi do komory pilotowej 5 z portu SUP przez zawór 1, a ciśnienie w Pilot Or komorę wzrasta, a ciśnienie powietrza działa Membrga 2 jest otwarta, a rdzeń 3 zaworu wydechowego jest zamknięty, co powoduje ciśnienie wyjściowe. To ciśnienie wyjściowe jest podawane z powrotem do obwodu kontrolnego 8 przez czujnik ciśnienia 6. Tutaj ciśnienie wyjściowe jest szybko porównywane z wartością docelową, aż będzie proporcjonalna do sygnału wejściowego, tak że ciśnienie wyjściowe zmieniło się proporcjonalnie do sygnału wejściowego. Ponieważ nie ma mechanizmu przegrody dyszy, zawór jest niewrażliwy na zanieczyszczenia i ma wysoką niezawodność.
Zdjęcie produktu
Szczegóły firmy







Zaleta firmy
Transport

FAQ






